|
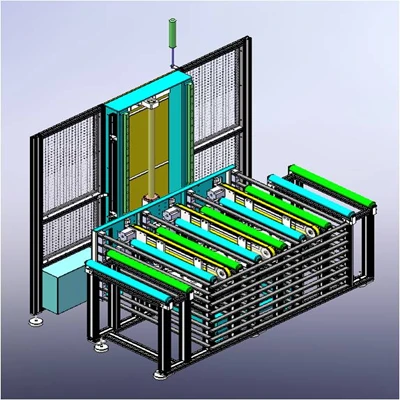
Funktsioon ja sissejuhatus
Klaasi kinnivõtmine ja ülekandeliinile panemine.
1.Klaasi laadimissüsteem koosneb klaasi liigutavast robotkäest ja paberikorjamise robotkäest.
2.Masin sisaldab kahte klaasihoidlat ja paberihoidlat.
3. Klaasi liikuv roboti käsi pani klaasi ülekandeliinile, samal ajal eemaldab paberikorjamise roboti käsi paberi.
4.Servomootoriga töötav masin tõmbab klaasi määratud jaama.
5. Klaasi laadimisroboti käsivarrel on konsoolkonstruktsioon ja paberikorje roboti käsi on pukkkonstruktsioon.
Peamine parameeter
Mooduli formaat: (1580-2000)mm*(800-1000)mm
Tsükli aeg:<35s
Max capacity: >2468 päevas
Operaator võrgus: puudub
Nimivõimsus: 8,26kw
Rõhk: 0,7 MPa+0,1
Sisendpinge: 380V
Mõõdud: 4610mmx2780mmx2150mm
Eelis
1.Masin kasutab teraskonstruktsiooni, millel on keevitusraami korpus, kõrge tugevus, töökindlus ja vastupidavus laadimise ajal.
2. Klaasikanduri imiplaat on valmistatud polüuretaanist, mis ei trüki laadimise ajal klaasile.
3.Servo mootor on täpne ja stabiilne.
4.Masin on tööohutuse tagamiseks varustatud kaitsepiirdega.
5. Vähendage operaatori laadimise ebakindlust, suurendage väljundit.
6.Masin on täisautomaatne ega vaja inimese sekkumist.
|